Club and Class Projects



ASTRID: Senior Capstone
Aero SAE RC Plane


During part of my freshman year and up till the end of my junior year of college, I participated in the Aero SAE club. The focus of this club was to create an RC plane that would compete in the yearly Aero SAE competition in which our plane would be tested by carrying some sort of form of weight while following a predetermined flight plan, all the while maintaining to specific design requirements.
When I was a part of the club, I was heavily involved in the fuselage team, which focused on designing and manufacturing the main body of the plane, making sure it was sturdy and spacious enough to house the required weights and other cargo while simultaneously fitting within the dimensional requirements set by the competition.
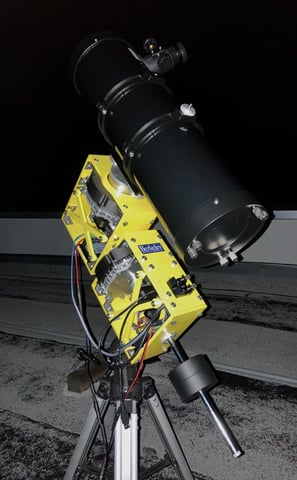
As part of my senior capstone project I worked on ASTRID, automatic star tracking robot with inferred direction. This project was essentially a motorized telescope mount that could determine where it was facing by taking a picture and determining the positions of the stars in the night sky in reference to each other. From here, the mount would be able to move the attached telescope in order to point at any desired celestial body and also rotate slowly and precisely enough to track said bodies as they moved through the night sky.
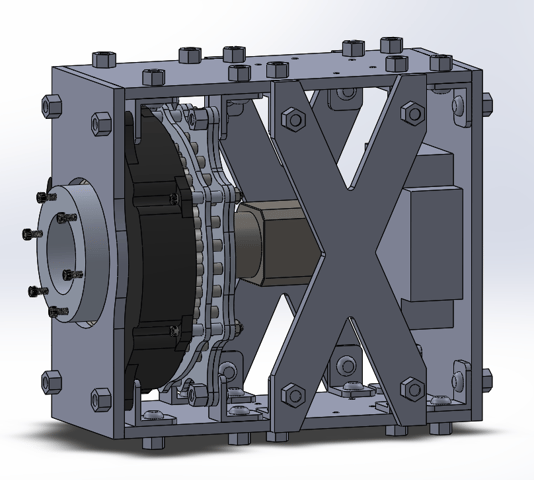
This project came with many different obstacles and challenges that were tackled by me and my team. For my part, I worked on manufacturing the physical frame of the mount, as well as aiding in the creation of the cycloidal drives. I chose to use cycloidal drives as the most optimal option for power transmission due to the constraints of providing a large gearing ratio in a compact package, having limited backlash, and ease of manufacturability in order to save on cost.
Overall, this project served as a great opportunity to apply theory from an academic setting to a real world experience. Additionally, I was able to acquire much of my machining and manufacturing experience through the creation of this project.
Internships and Research


Autonomous Ocean Drone
As part of the TAFLAB research group, I worked on the production of an autonomous sailing drone that could be mass produced and sent out into the ocean in order to collect data from the ocean waves. This data would be relayed via a mesh network from all of the drones, and would allow more efficient shipping routes to be planned in order to help decrease the amount of fuel burned by cargo ships.
During my time in the research group, I focused on working on the physical prototypes. Due to the specific requirements of our final mission, we focused on ease of manufacturability, durability, longevity, and cost as the main areas of concern for the final design of the drone. As such, we went through multiple iterations of the design, making each out of off-the-shelf components and 3D-printed parts. Each of these drones cost around $200 to make, which was well within our budget of $500, and as of right now, new prototypes are still being worked on in the TAFLAB.
Hair Braiding Machine
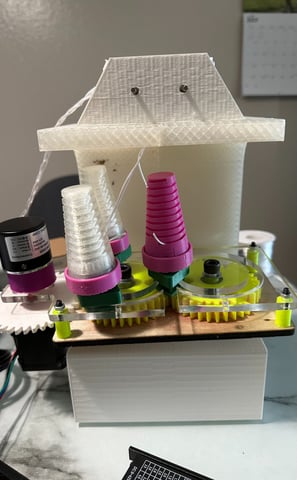

While working as a mechanical engineering intern for Hair Robotics, a UC Berkeley funded startup, over my summer as a rising senior, I worked on the existing prototype for a hair braiding machine. The hope for the machine was that it would eventually help cut down on the multi-hour long process of braiding hair, allowing for improved customer experience, lessened fatigue for the hair braider, an increase in throughput, and a rise in profits for hair salons.
For this internship I worked on making improvements in different areas of the design, such as adding an extraction mechanism to provide a more consistent extraction velocity, as well as working on the bobbin mechanism and the maypole gear mechanism. All of these design changes helped in improving both the quality of the braids produced, and the rate at which the braids could be produced.
My Portfolio
Showcasing my projects, internships, and research groups
Contact
gilbertodiaz9707@gmail.com
+1 909-997-6274
© 2024. All rights reserved.